We are a dynamic research group at the University at Buffalo. Our mission is to advance the integration of wireless systems into robotics, focusing on innovative solutions for challenges such as radar-based sensing, Wi-Fi-based localization, and their applications in robotics and autonomous systems.
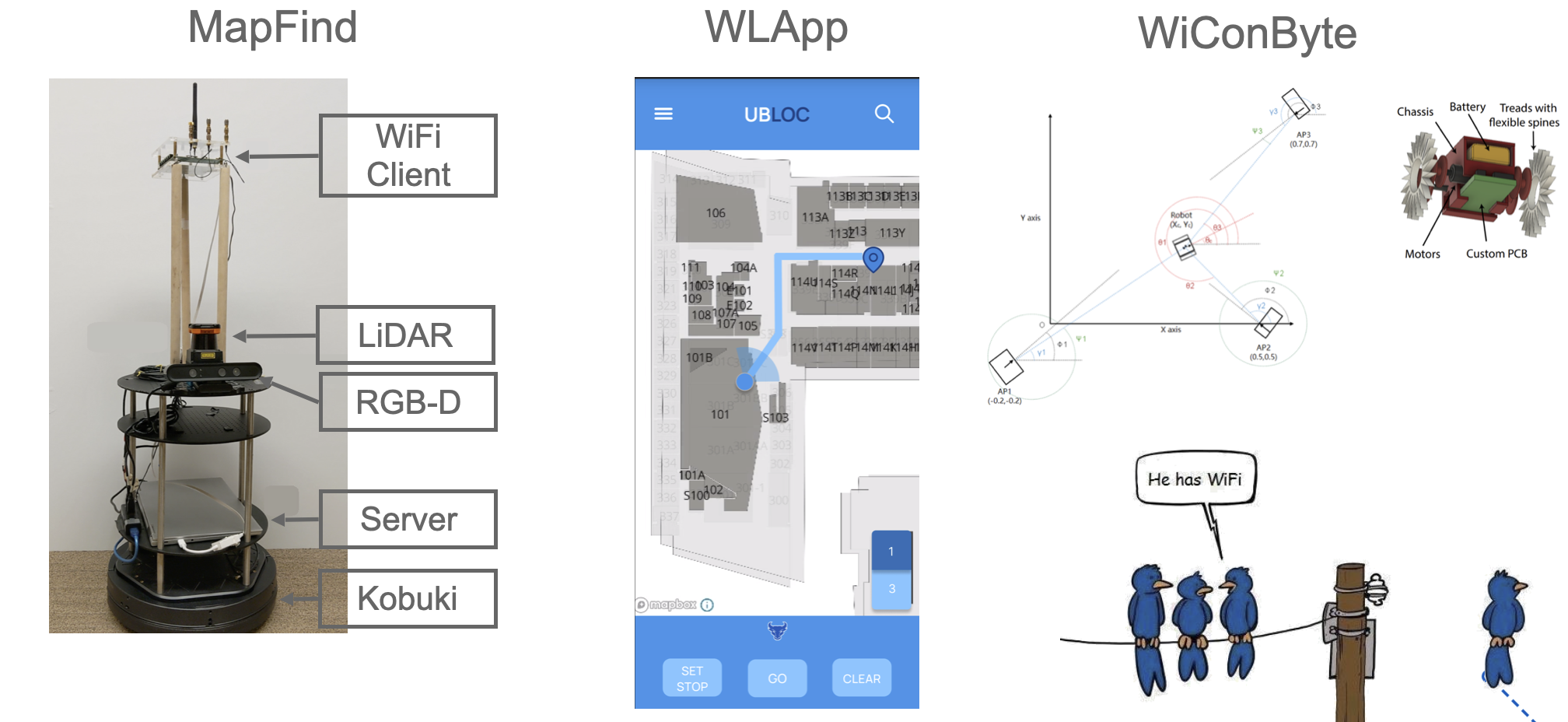
One of our key focuses is developing innovative localization solutions for tiny robots that lack traditional sensors such as encoders. By leveraging wireless signals, including Wi-Fi RSSI (Received Signal Strength Indicator), we aim to achieve precise and robust localization in environments where traditional methods are impractical. This enables the deployment of cost-effective, lightweight robots in a variety of applications.
Additionally, we are scaling these tiny robots into cooperative swarm systems, exploring decentralized control, communication, and mapping strategies. By combining Wi-Fi localization with swarm robotics principles, we aim to enhance multi-robot coordination for tasks like search-and-rescue, environmental monitoring, and warehouse automation.
In addition, our lab is pioneering the use of RF imaging technology for plastic waste recycling. Traditional camera systems often struggle to detect and classify materials beneath surface layers, limiting their effectiveness in sorting processes. By utilizing RF imaging, we can penetrate these upper layers and obtain critical information about the composition and location of buried plastics. This innovative approach has the potential to revolutionize waste recycling by improving sorting accuracy and efficiency, ultimately contributing to more sustainable practices in waste management.
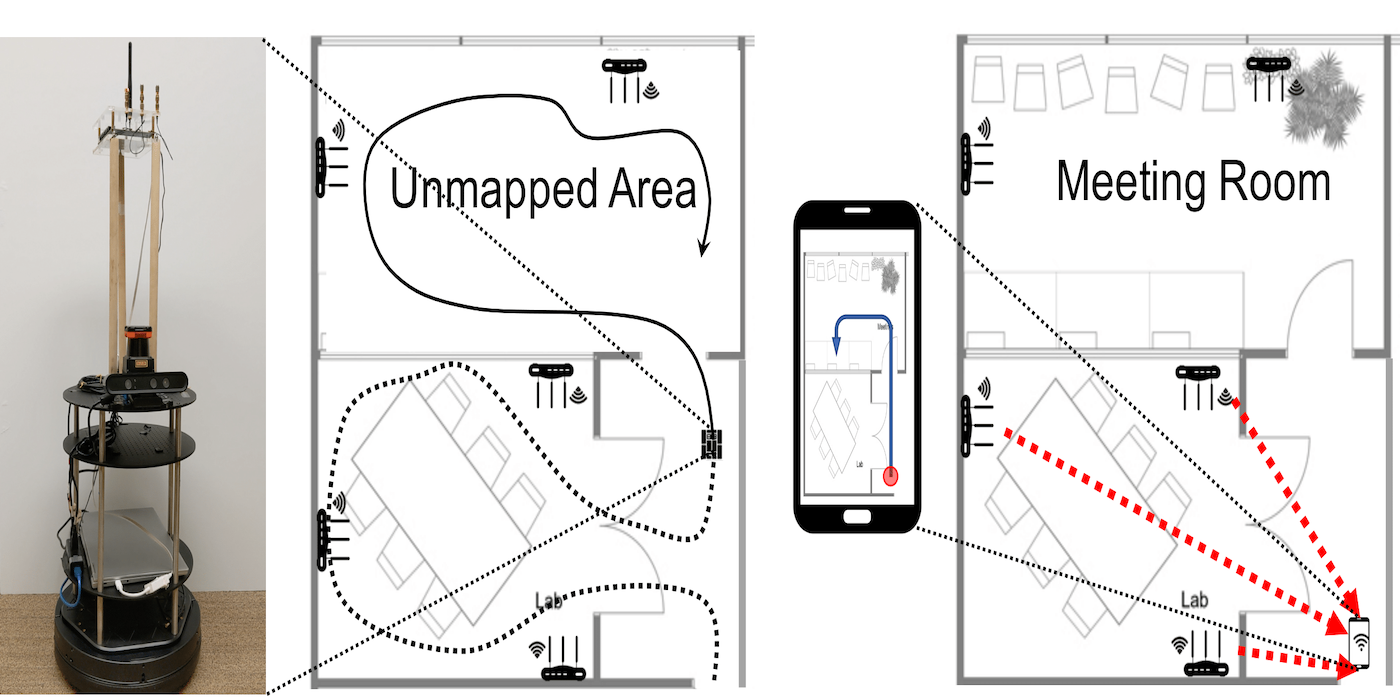
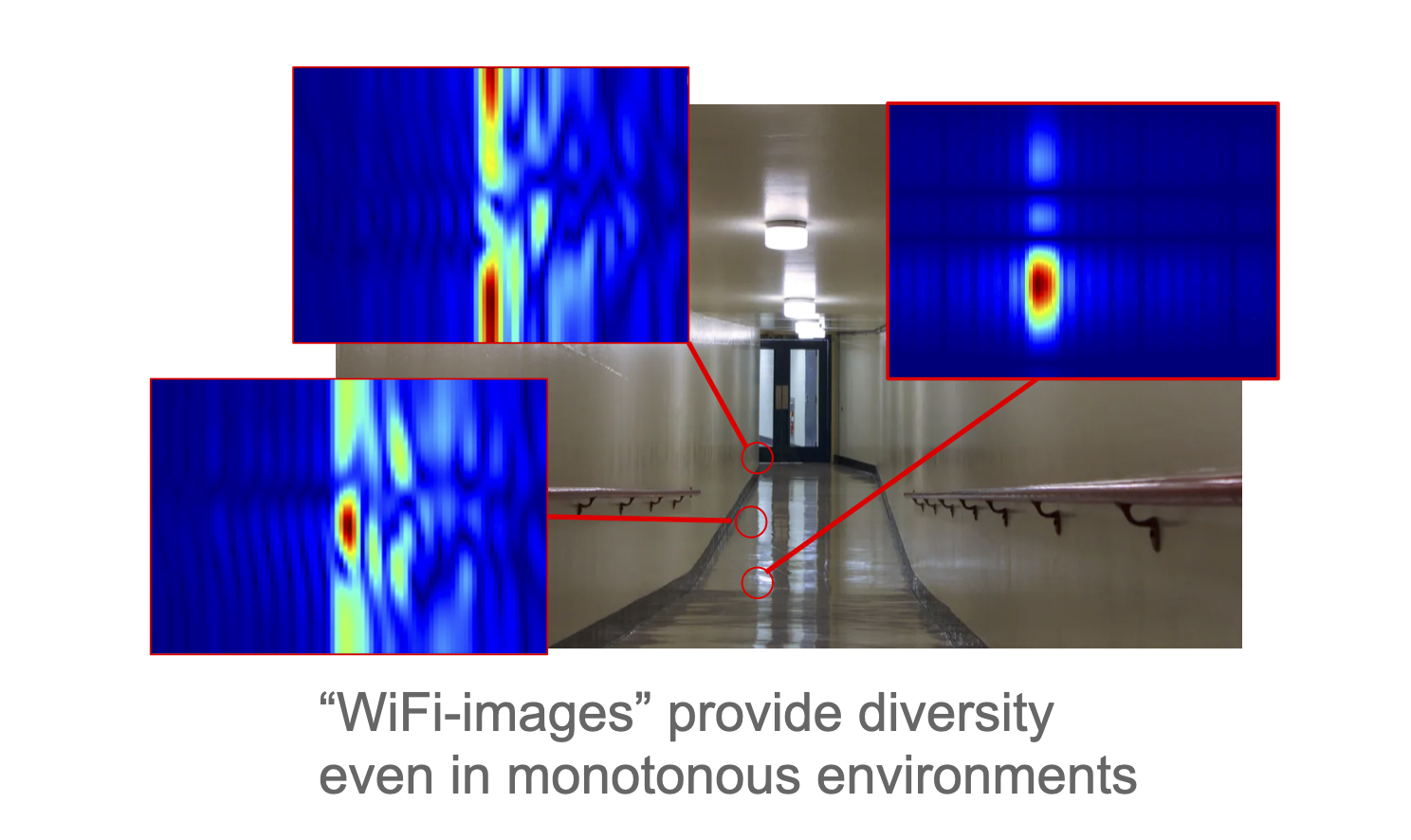
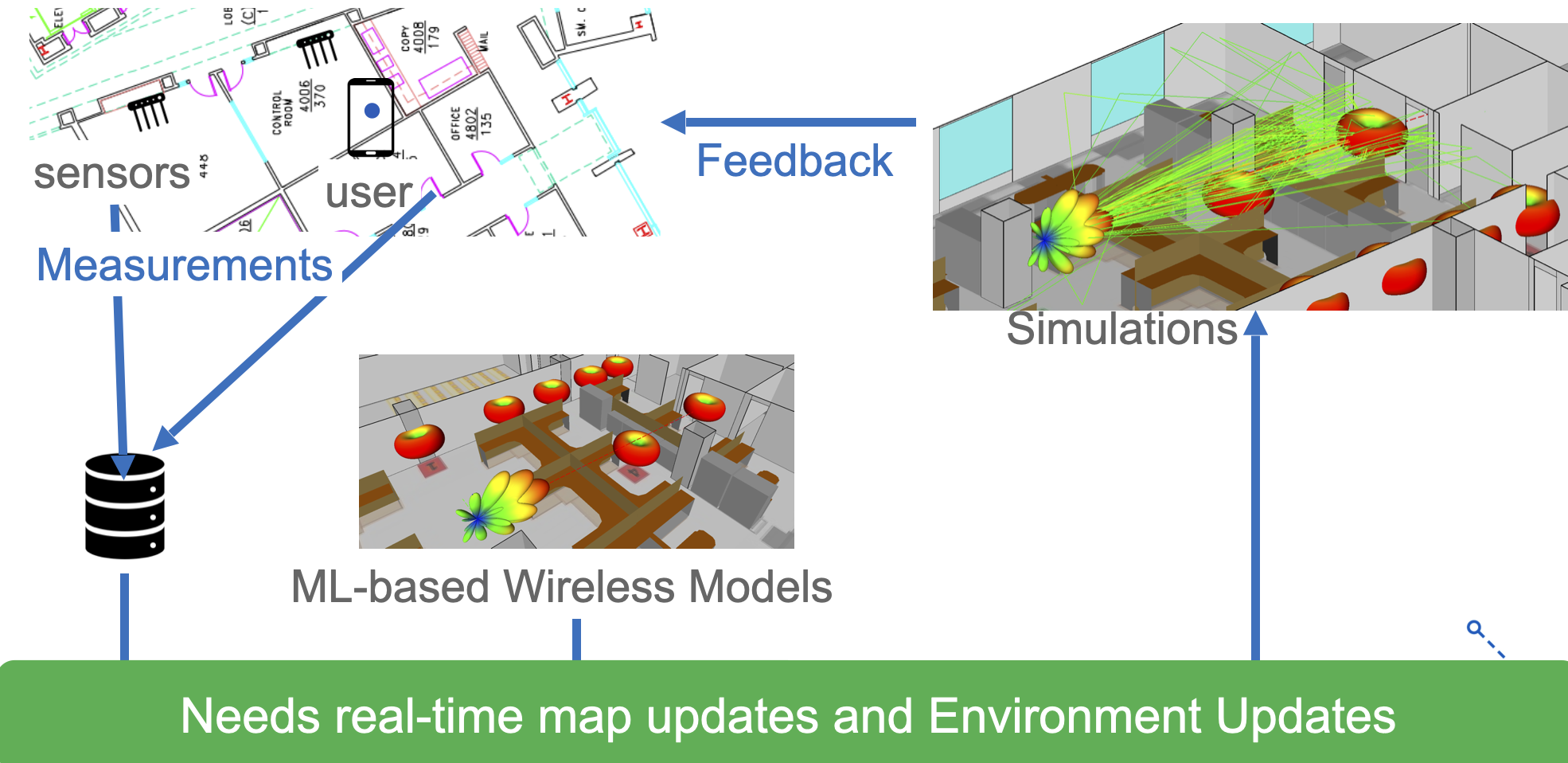
Furthermore, we are exploring the use of Wi-Fi as a robust sensor for localization, especially in environments where traditional sensors like cameras face limitations. Cameras often struggle in challenging lighting conditions, such as low light, glare, or excessive brightness. Wi-Fi-based localization offers a resilient alternative that is not affected by visual disruptions, providing consistent and reliable positioning even in dynamic and unpredictable environments.
Our mission is to push the boundaries of robotics and wireless systems, creating scalable, impactful solutions for real-world challenges while contributing to advancements in technology and sustainability.
Users are Closer than they Appear: Protecting User Location from WiFi APs paper is published in 24th International Workshop on Mobile Computing Systems and Applications
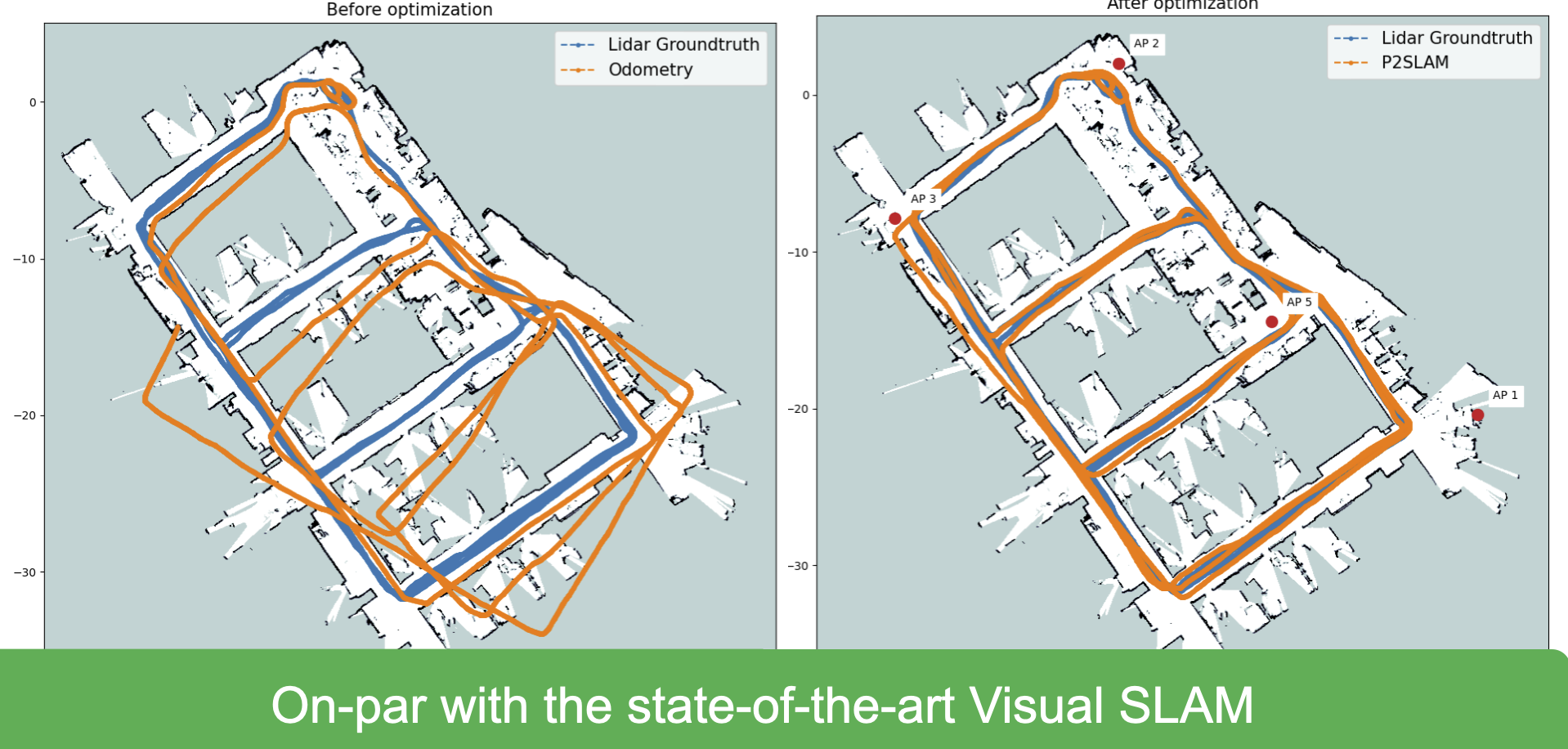
22. April 2022P2SLAM paper is published in IEEE Robotics and Automation Letters
22. October 2021Location determination of wireless communications devices is patented.